1. Funded Research Projects
- Fault-Tolerant Workspace Analysis for Redundant Space Robots Experiencing Locked Joint Failures (NASA Kentucky EPSCoR RIDG award, PI: Biyun Xie, Funding Amount: $45,000, 8/1/2020 – 7/31/2021)
- Human-Like Motion Planning of Collaborative Robots based on Human Arm Motion Analysis (SCEEE Development Fund, PI: Biyun Xie, Funding Amount: $32,500, 8/1/2020 – 7/31/2021)
- Teaching Humanoid Robots by Demonstration with Preserved Dynamics and Adaptability Skills (UK College of Engineering Young Alumni Philanthropy Council Funding, PI: Biyun Xie, Funding Amount: $3,134, 1/1/2022-12/31/2022)
- Autonomous Fault-Tolerant Operation of Redundant Robotic Arms (National Science Foundation, PI: Biyun Xie, Co-PI: Jiangbiao He, Funding Amount: $499,365, 9/1/2022-8/31/2025)
- Developing a Demonstration-Based Motion Planner for Space Telerobots (NASA Kentucky EPSCoR RIDG award, PI: Biyun Xie, Funding Amount: $34,998, 4/1/2023 – 12/31/2024)
- Automated Fabrication of Spherical Double-Helix Tensegrity (DHT) Robots (UK College of Engineering Mini-Grant Program, PI: Muhao Chen, Biyun Xie, Funding Amount: $10,000, 1/1/2025-5/15/2025)
- CAREER: Safe and Reliable Human-Robot Shared Control for Robotic Telemanipulation in Complex and Extreme Environments (National Science Foundation, PI: Biyun Xie, Funding Amount: $602,698.00, 9/1/2025-8/31/2030)
- CPS: Medium: An Autonomous Robotic System for Precision and High-Throughput Tomato Phenotyping in Large-Scale Greenhouses (National Science Foundation, PI: Biyun Xie, Co-PI: Lauren Brzozowski, JiangBiao He, Hongkai Yu, Funding Amount: $1,179,584, 7/15/2025-7/14/2028)
2. Research Topics
1. Basic Motion Planning
Collision avoidance, optimal motion planning (optimizing path costs), constrained motion planning (satisfying specific constraints), and reactive and sensor-based motion planning are classic problems in robot motion planning. Numerous motion planning algorithms have been developed to tackle these essential problems, which can be categorized into four main groups:graph-based motion planners, sampling-based motion planners, optimization-based motion planners, and learning-based motion planners. Our lab focuses on developing new motion planning algorithms that leverage the strengths of each approach to effectively address these fundamental challenges in robot motion planning.
2. Fault-Tolerant Motion Planning
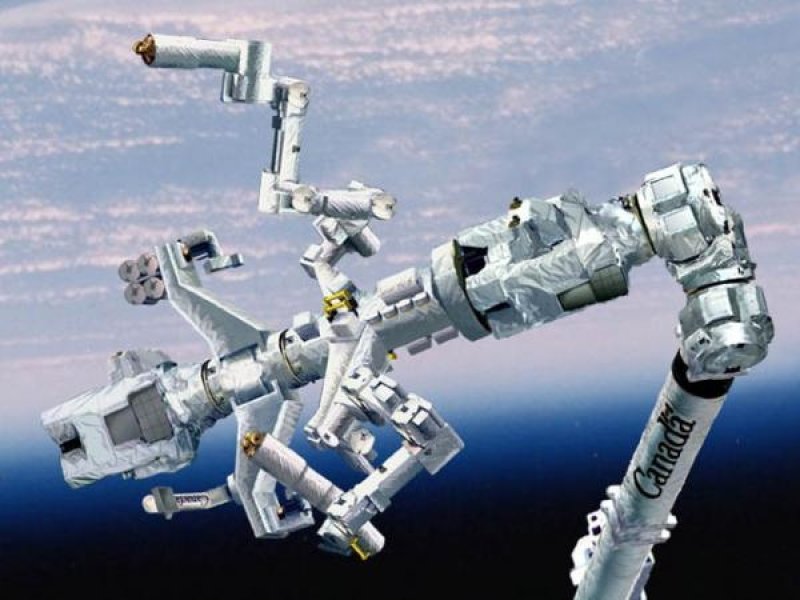
In recent years, robots have become increasingly common for a wide range of applications, and the reliability of robots operating in structured and benign environments is quite high. However, for dangerous tasks in remote or hazardous environments, where routine maintenance can not be performed, one must plan for the probability of failures. Such applications include space exploration, nuclear waste remediation, and disaster rescue. One may also want to employ fault-tolerant robots in applications requiring high degrees of safety, such as robotic surgery, rehabilitation, and human-robot interaction.
![]()



(a) space exploration (b) nuclear waste remediation (c) disaster rescue (d) robotic surgery (e) human-robot interaction
In addition to improving the reliability of the components of the robot, one can also employ kinematically redundant robots to take advantage of their extra degrees of freedom (DOF) to tolerate different types of joint failures. Our research work focuses on how kinematic redundancy can be utilized to design optimally fault-tolerant robotic systems. Most of the conventional fault-tolerant control methods focus only on failure recovery, and unfortunately, it is usually too late to mitigate damages after failures occur. Our proposed kinematic design of optimally fault-tolerant robots and fault-tolerant motion planning methods in anticipation of all potential failures can guarantee task completion and optimal post-failure performance.
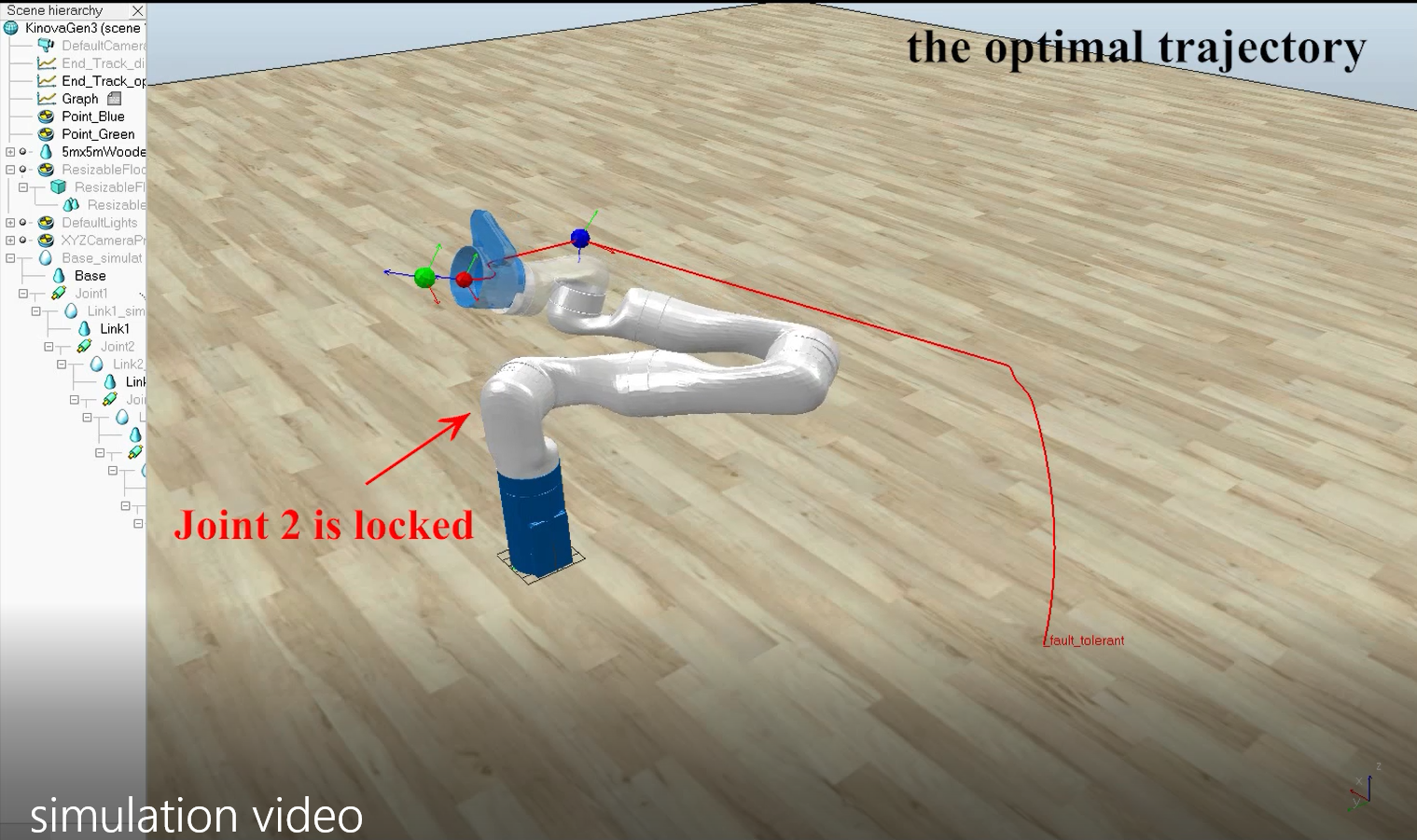
Motion Planning for Maximizing Task Completion Probability Computing Self-Motion Manifolds for Real-Time Fault-Tolerant Motion Planning
3. Shared Control and Learning from Demonstration
Robot shared control is a collaborative approach that blends human decision-making with robotic autonomy to enhance task performance and safety. Unlike fully autonomous systems or purely manual control, shared control allows both the human operator and the robot to contribute to the control process in real time. This dynamic partnership leverages the strengths of both parties—human intuition and adaptability combined with robotic precision and consistency. Shared control is particularly useful in complex or uncertain environments, such as assistive robotics, surgical systems, or remote exploration, where full autonomy may be risky or infeasible. Our lab focuses on developing motion planning algorithms for shared control and seamlessly integrating these autonomous motion planning algorithms with manual teleoperation.
Robot learning from human demonstration is a technique where robots acquire new skills by observing and imitating human actions. Instead of being explicitly programmed for every task, the robot learns by watching a human perform the task and then generalizing that behavior to similar situations. This approach makes it easier and more intuitive to teach robots complex or nuanced activities, especially in environments where traditional programming is difficult or time-consuming. Our lab focuses on developing demonstration-guided motion planning algorithms to generalize learned human skills for new tasks and novel environments.
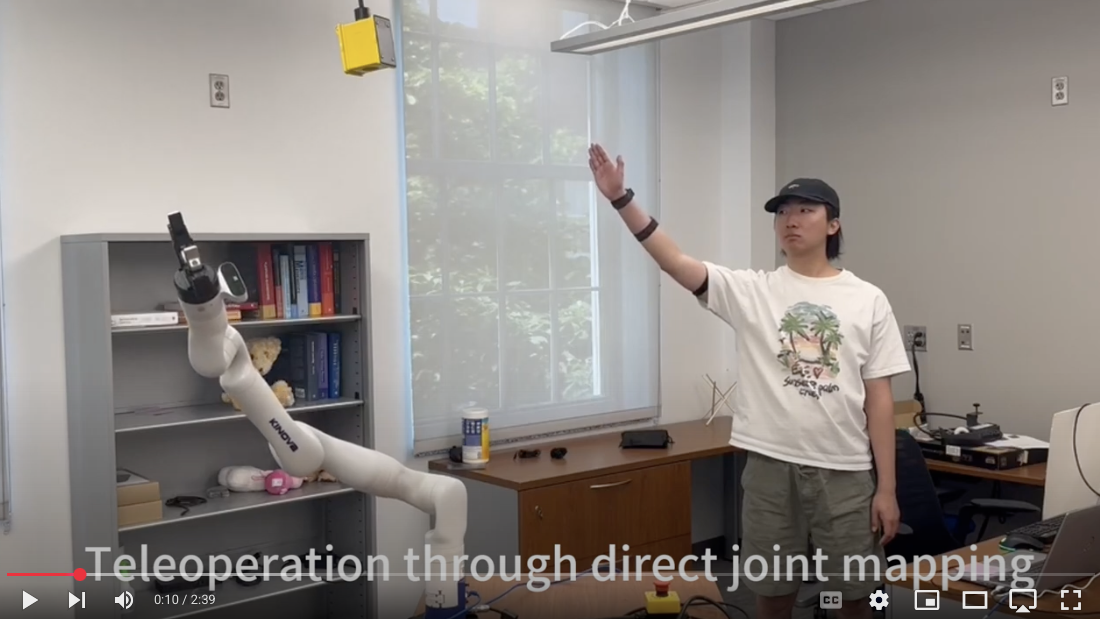

Robot Teleoperation by Real-Time Human Arm Motion Imitation Robot Learning from Human Demonstration
4. Ethics in Human-Robot Interaction
Our lab collaborates with Dr. Jessica Barfield to study human-robot interaction, focusing on the ethical issues related to the design and use of social robots. Robot ethics, also known as roboethics, addresses the ethical concerns that arise from deploying robots in social settings. While much research in roboethics focuses on how humans are treated by robots, our work examines the ethical treatment of increasingly intelligent robots by humans. Specifically, we investigate whether the robot would be the subject of discrimination within society.

