1. Funded Research
- Fault-Tolerant Workspace Analysis for Redundant Space Robots Experiencing Locked Joint Failures (NASA Kentucky EPSCoR RIDG award, Role: PI, Funding Amount: $45,000, 8/1/2020 – 7/31/2021)
- Human-Like Motion Planning of Collaborative Robots based on Human Arm Motion Analysis (SCEEE Development Fund, Role: PI, Funding Amount: $32,500, 8/1/2020 – 7/31/2021)
- Teaching Humanoid Robots by Demonstration with Preserved Dynamics and Adaptability Skills (UK College of Engineering Young Alumni Philanthropy Council Funding, Role: PI, Funding Amount: $3,134, 1/1/2022-12/31/2022)
- Autonomous Fault-Tolerant Operation of Redundant Robotic Arms (National Science Foundation, Role: PI, Funding Amount: $499,365, 9/1/2022-8/31/2025)
- Developing a Demonstration-Based Motion Planner for Space Telerobots (NASA Kentucky EPSCoR RIDG award, Role: PI, Funding Amount: $34,998, 4/1/2023 – 12/31/2024)
2. Research Topics
1. Kinematic Design and Motion Planning of Fault-Tolerant Robots
In recent years, robots have become increasingly common for a wide range of applications, and the reliability of robots operating in structured and benign environments is quite high. However for dangerous tasks in remote or hazardous environments, where routine maintenance can not be performed, one must plan for the probability of failures. Such applications include space exploration, nuclear waste remediation, and disaster rescue. One may also want to employ fault tolerant robots in applications requiring high degrees of safety, such as robotic surgery, rehabilitation, and human robot interaction.
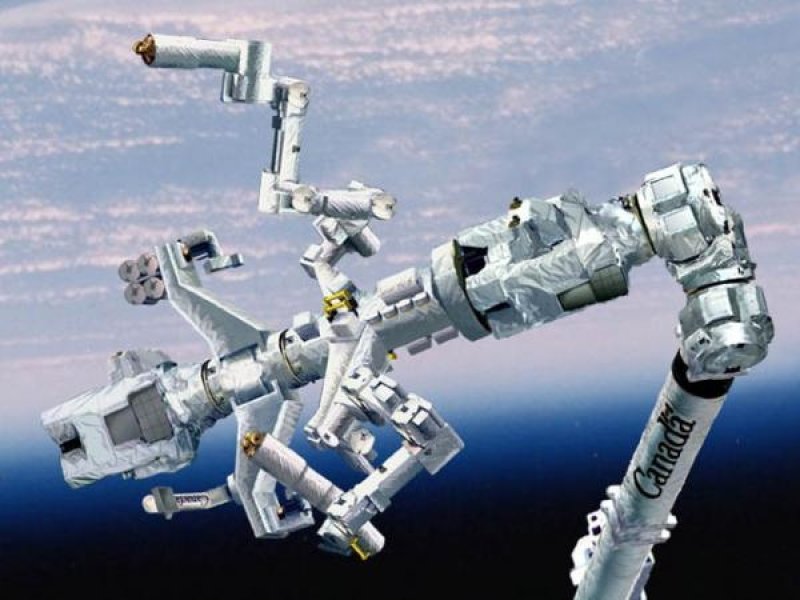
![]()



(a) space exploration (b) nuclear waster remediation (c) disaster resecure (d) robotics surgery (e) human-robot interaction
Fig.1 the applications of fault-tolerant robots
In addition to improving the reliability of the components of the robot, one can also employ kinematically redundant robots to take advantage of their extra degrees of freedom (DOF) to tolerate different types of joint failures. It has been previously shown that an improperly designed or controlled kinematically redundant robot can actually be fault intolerant. Our research work focuses on how kinematic redundancy can be utilized to design optimally fault-tolerant robotic systems. Most of the conventional fault-tolerant control methods focus only on failure recovery, and unfortunately it is usually too late to mitigate damages after failures occur. Our proposed kinematic design of optimally fault-tolerant robots and fault-tolerant motion planning methods in anticipation of all potential failures can guarantee task completion and optimal post-failure performance.
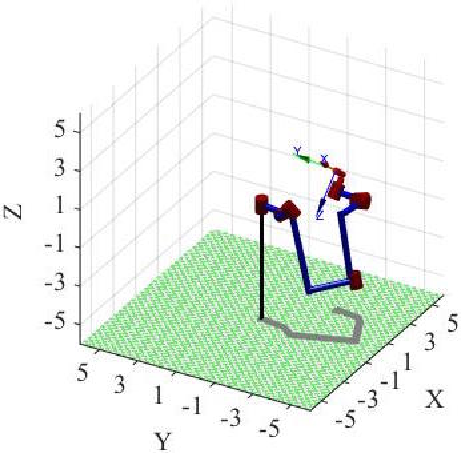
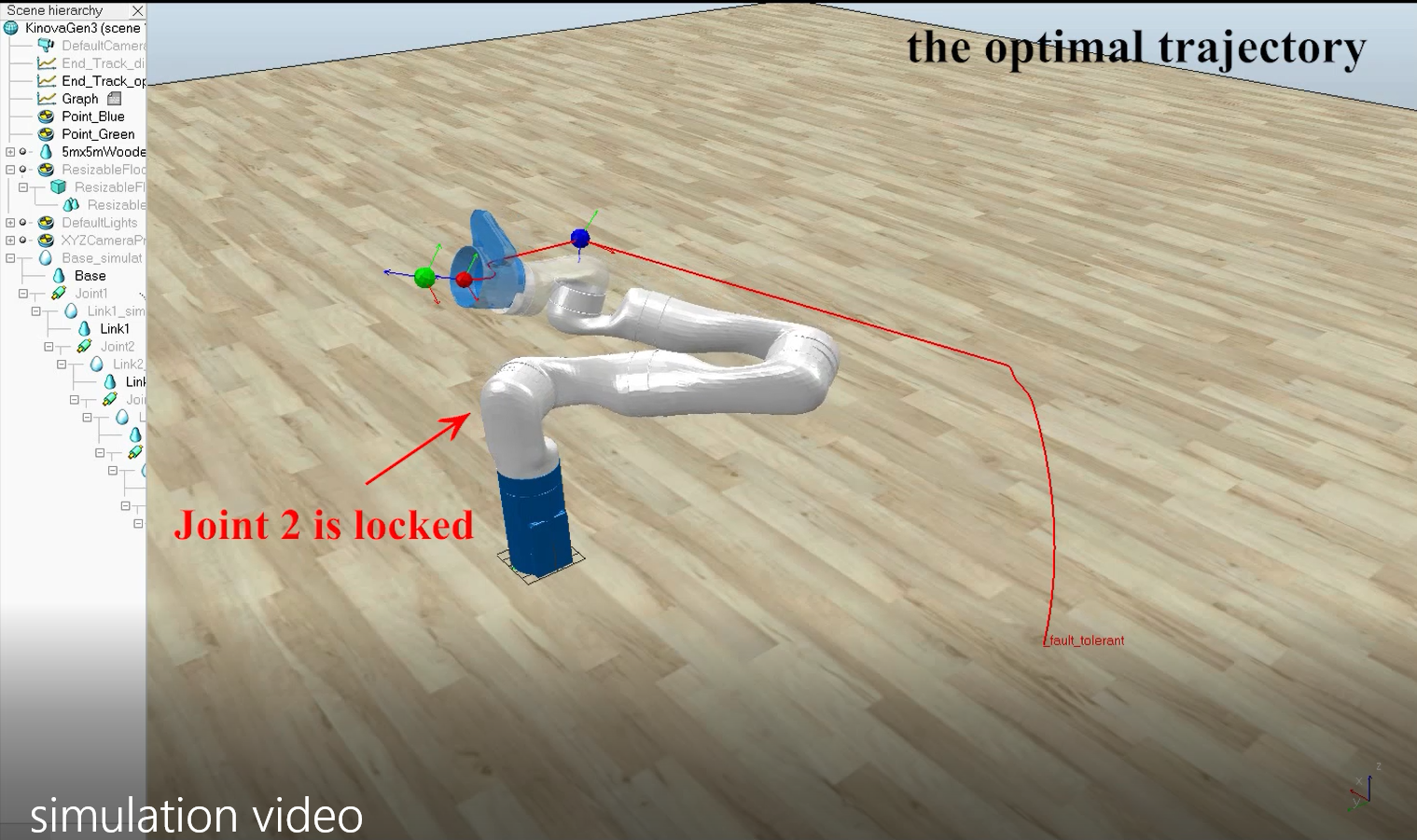
Fig. 2 the designed optimally fault-tolerant 7R robot Fig. 3 A video showing the comparisons between fault-intolerant and fault-tolerant trajectories
2. Motion Planning of Collaborative Robots
Contrary to traditional industrial robots isolated from human workers by fences, a collaborative robot or cobot is designed for direct human-robot interaction within a shared space. With the fast development of robotic techniques, robot companies have developed various collaborative robots, such as ABB YUMI, KUKA IIWA, and Baxter, widely employed in the manufacturing of automotive, consumer electronics, semiconductors, etc. Compared to fully autonomous robots, integrating collaborative robots’ advantages, such as efficiency and reliability, with human workers’ advantages, such as dexterity and intelligence, has become a promising production mode for today’s manufacturing industry.
Safety, efficiency, and human-friendliness are the critical issues in the motion planning of collaborative robots. Our lab focuses on developing intelligent and robust motion planning algorithms to generate human-like motion for collaborative robots, map human to robot motion, and teach collaborative robots by human demonstration. The main applications of these studies include collaborative manufacturing assembly, daily assistance, social service, etc.

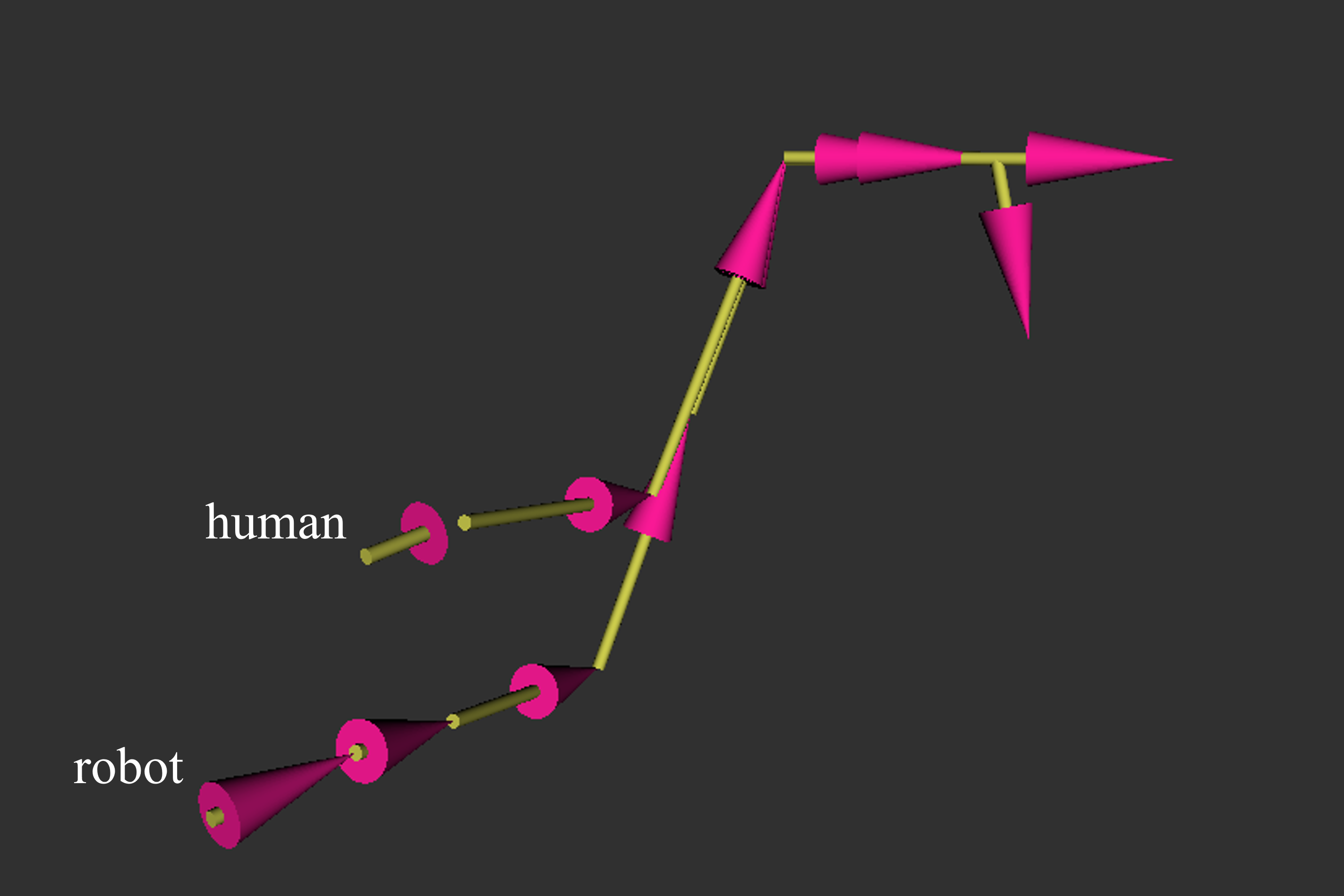

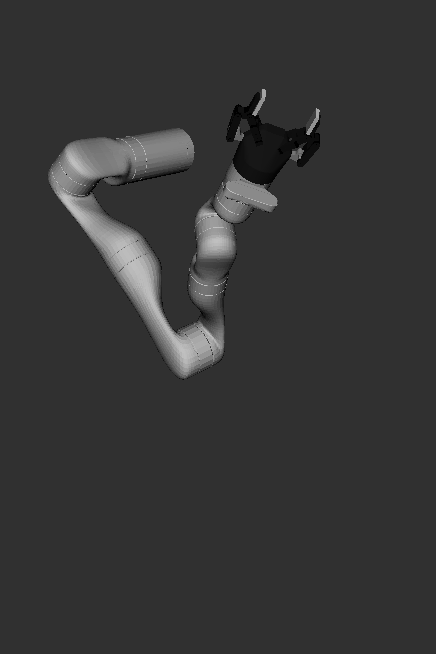
Fig. 4 human-robot motion retargeting Fig.5 robot learning from demonstration